16. Turtlesim Comms: List Nodes
Turtlesim Comms: List All Active Nodes
In the following concepts, we will investigate Turtlesimm Comms, and will cover the following steps:
- Listing all active nodes
- Listing all topics
- Getting information about topics
- Showing message information
- Echoing messages in real-time
Now that we’ve launched
turtlesim_node
, and played around with sending commands via the
turtle_teleop_key
node, let’s dig deeper, to see what’s actually happening underneath the surface…
Turtlesim Comms: List Active Nodes
Listing all Active Nodes
To get a list of all nodes that are active and have been registered with the ROS Master, we can use the command
rosnode list
. Let’s do so now:
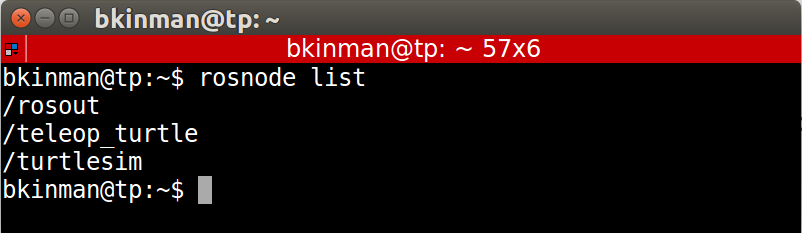
Listing active nodes
We can see that there are three active nodes that have been registered with the ROS Master,
/rosout
,
/teleop_turtle
, and
/turtlesim
.
-
/rosout
This node is launched by roscore. It subscribes to the standard /rosout topic, the topic to which all nodes send log messages. -
/teleop_turtle
This is our keyboard teleop node. Notice that it’s not named turtle_teleop_key. There’s no requirement that a node’s broadcasted name is the same as the name of it’s associated executable. -
/turtlesim
The node name associated with the turtlebot_sim node